PROJECT TITLE
“Autonomous Tree Planting Robot”
COLLABORATION WITH
Robin Price
Ieva Jakusa
Maria Oiva
Rico Herzog
PROJECT TYPE
Design & Research
SUPPORTED BY
City Science Lab Hamburg
Climate Service Center Germany (GERICS)
German Federal Cultural Foundation
EXHIBITED AT
Jupiter, Hamburg (2023)
The
project explores alternative approaches to city planning with a speculative
proposal for an autonomous tree planting robot.
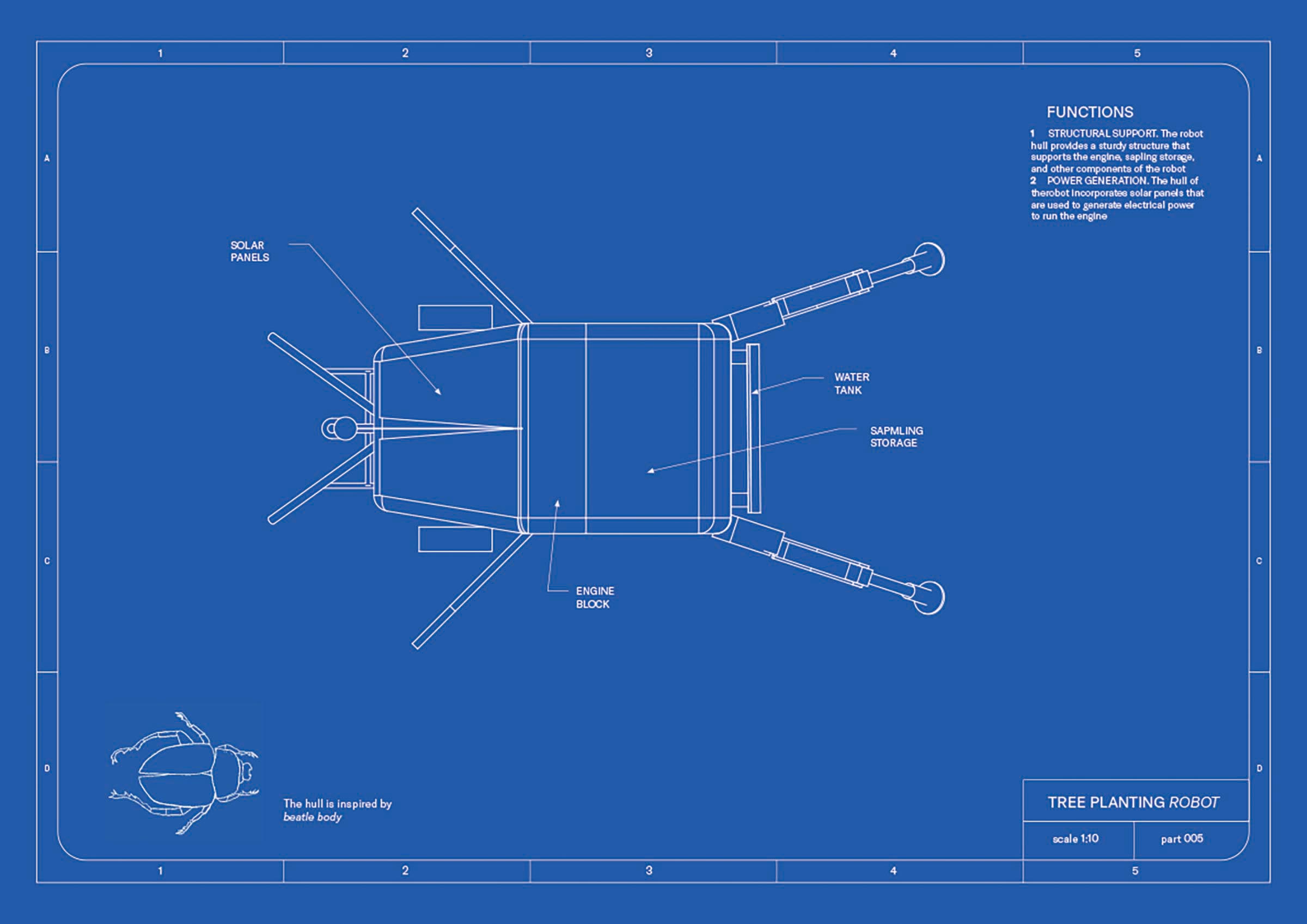
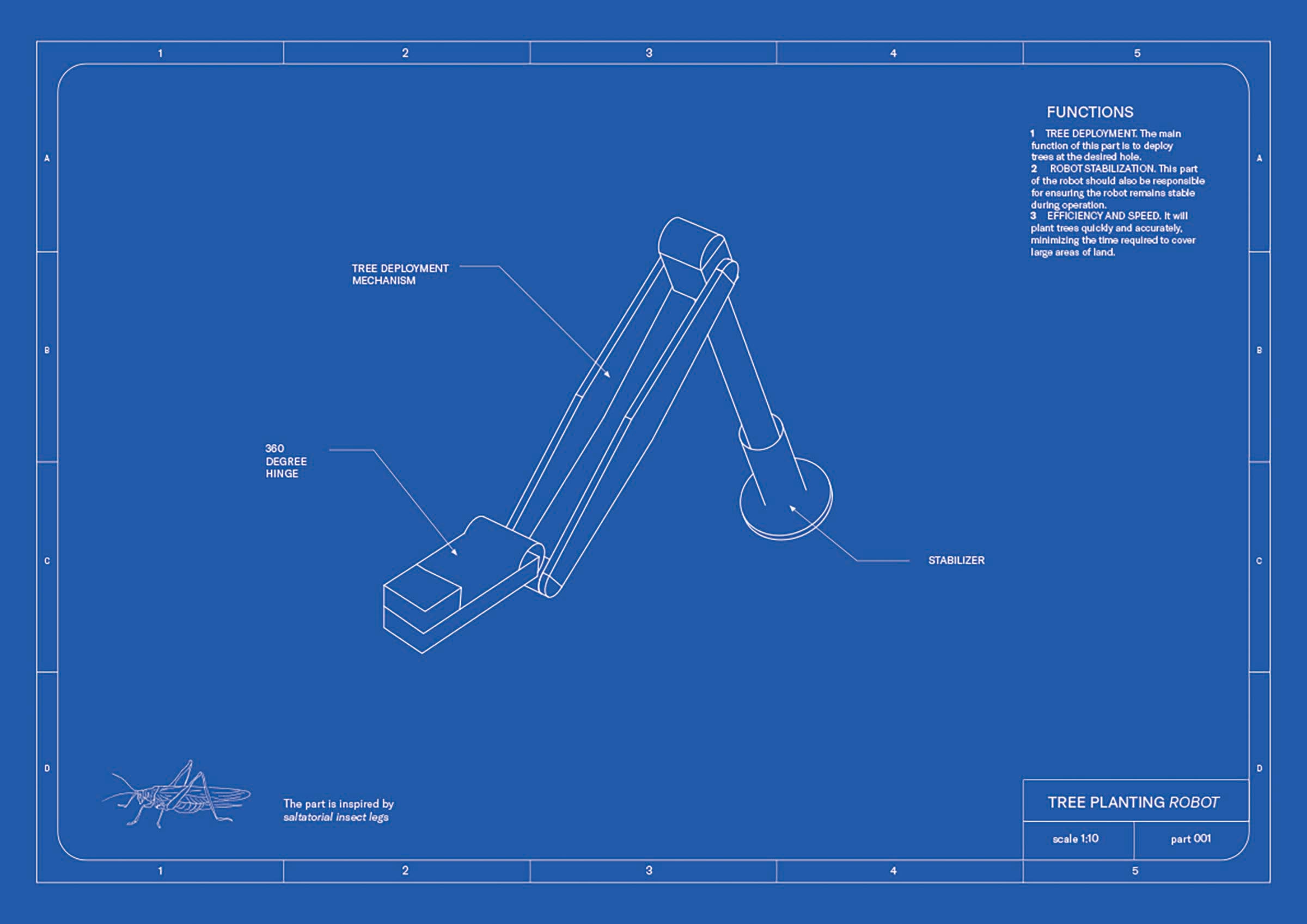
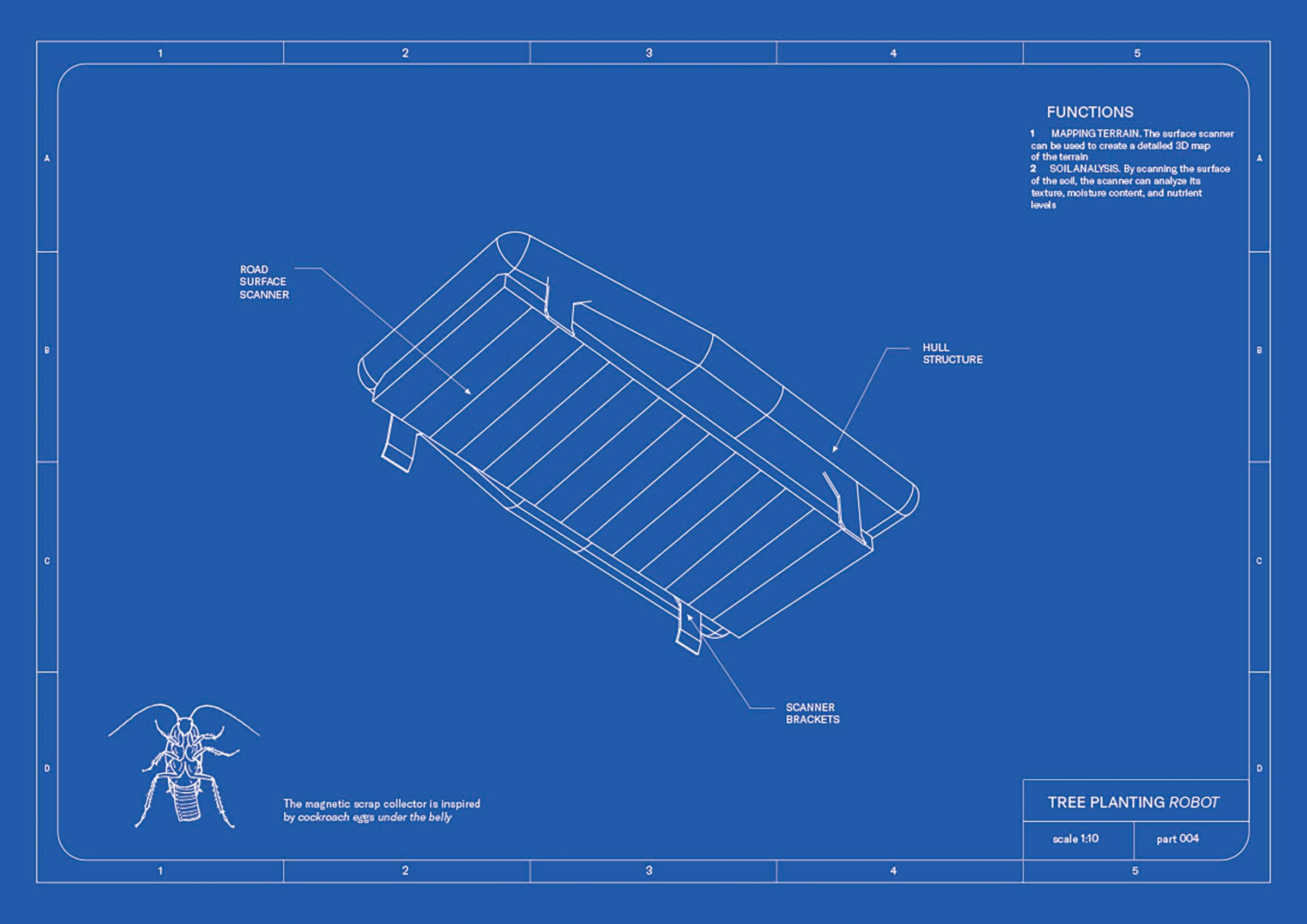
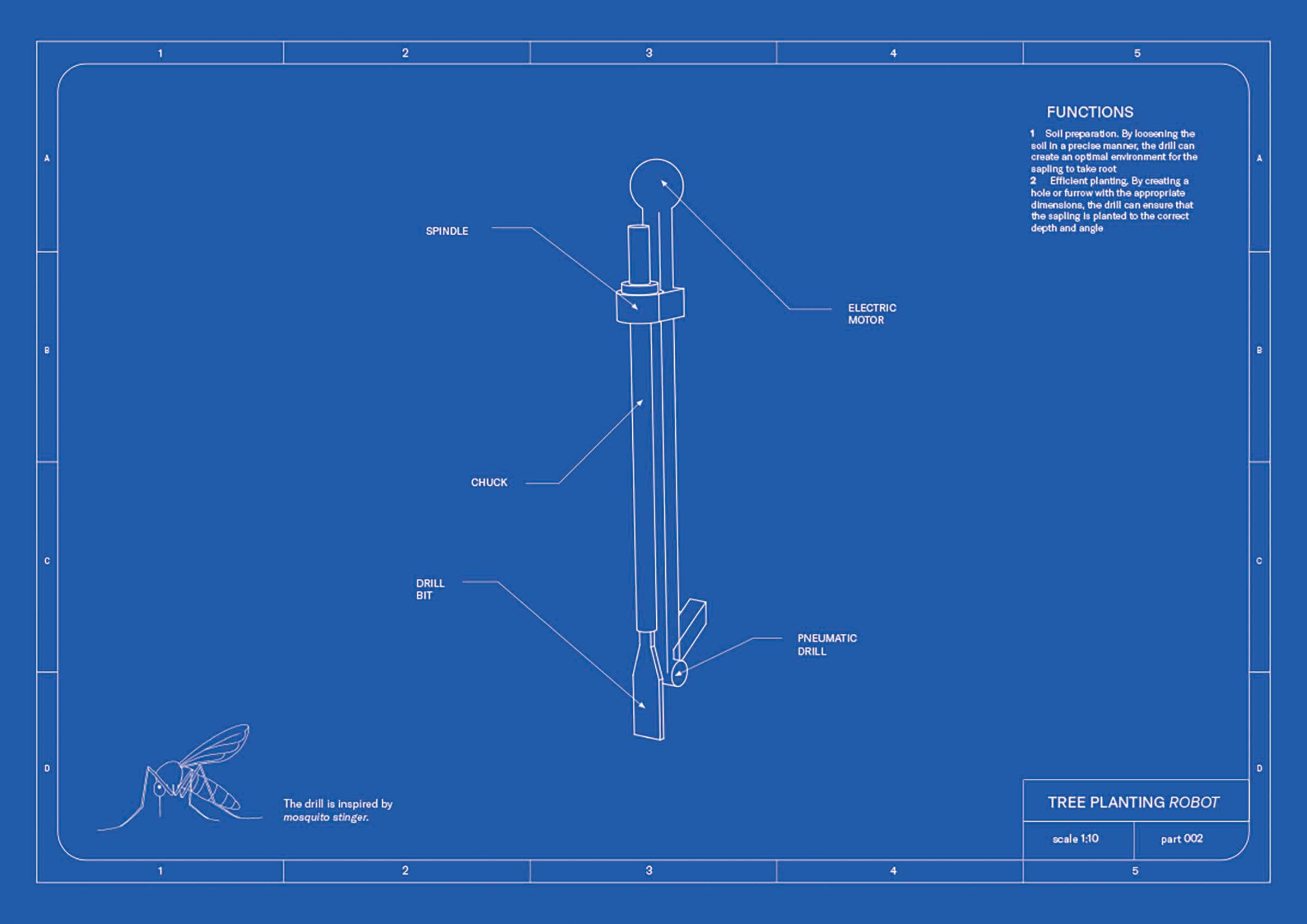
Equipped with sensors, solar panels, and a drill, the robot is programmed to plant trees in heat islands across Hamburg. Regardless of
whether in the middle of a highway, or a busy public square, the robot’s
single criteria for deciding whether to intervene is based on temperature and
surface data. If it’s too hot and on the right surface, the robot will drill
into the asphalt and plant a tree.
Urban heat islands pose a growing risk to human health and the global climate, as temperatures in cities are rising faster than their surroundings. This is down to the enormous solar gain of concrete and asphalt surfaces, and a result of the priorities of modern city planning: focused on cars and road infrastructures at the expense of green spaces. Trees are one of the simplest solutions to urban heat
islands: shading hard road surfaces from solar gain.
By outsourcing this task to a swarm of autonomous tree planting robots, the project asks several questions: What if city planning was automated strictly according to climate data? What if cities prioritised trees over cars? What if city planning prioritised climate and
ecosystem health over human comfort and the economy? How would city planning
change if we relinquished control to non-human actors? What trade-offs and
compromises will we have to make in the face of the climate crisis?
The design of the robot draws inspiration from different insects: grasshoppers, mosquitoes, cockroaches, beetles, and stalk eyed flies. The result is a kind of mutant insect: a robot pollinator.
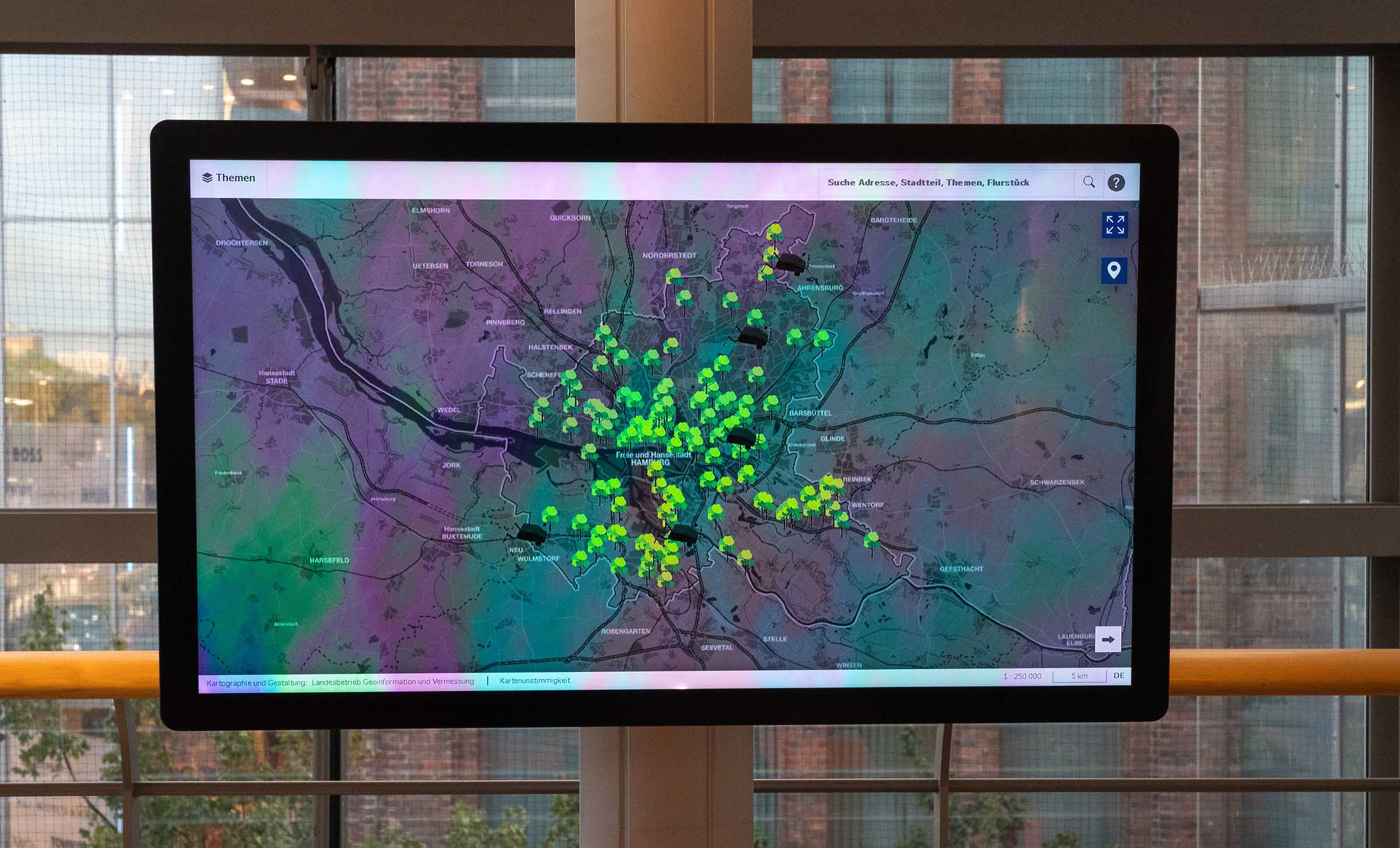
We have developed an algorithm for a speculative simulation of Hamburg—which draws on climate data and scientific input from GERICS (Climate Service Center Germany), to hack the code of Connected Urban Twin, an agent-based simulation tool of the City Science Lab. Using data of urban heat islands in Hamburg, the simulation projects into the future and shows a gradually appearing urban forest, resulting from the robots’ activity.
The simulation highlights a number of potentially relevant places within the city where trees should be planted. We plan on inviting city planners of Hamburg to consider planting physical trees in these locations.
This project is an outcome of “City Climate meets Creative Coding,” a research project initiated by the City Science Lab at HafenCity University Hamburg, with the aim of fostering collaboration between artists and scientists in the context of climate change, data, and city planning. The project was awarded additional funding from the German Federal Cultural Foundation and was presented to the public in October 2023, as part of an exhibition at JUPITER, Hamburg.